HRS-1 – Hand Radiolocation System for tracking flying vehicles
HRS-1 is a Radiolocation System (RS) developed at SpaceForest for tracking flying objects. The system can be used for tracking sounding rockets, weather balloons, drones, and other objects in order to allow monitoring of the flight trajectory and to retrieve the object after any failure or the end of the flight.
The RS consists of two terminals:

internal – planted inside the flying object (Rocket Terminal – RT) including an omnidirectional antenna
external – used on the ground (Terrestrial Terminal – TT), including a directional Yagi-Uda antenna.
The terminals communicate within the unlicensed ISM radio frequency of 869 MHz using the half-duplex method.
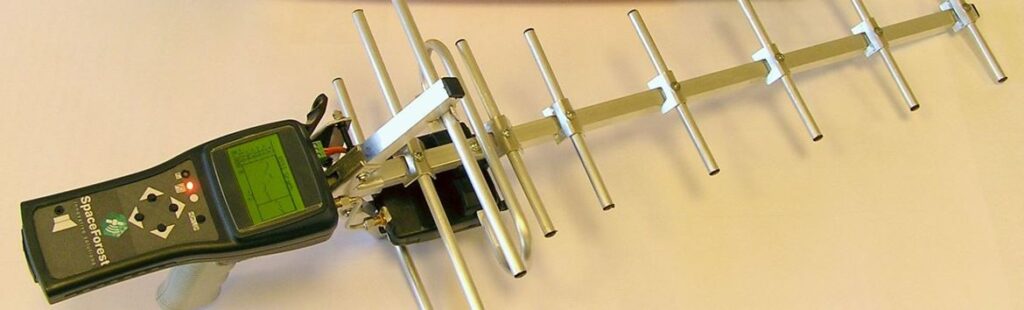
Both terminals are equipped with GPS/GLONASS and Communication & Control modules. The Rocket Terminal includes a power amplifier with +27 dBm (0.5 W) output power and an omnidirectional antenna. The RT (shown below) is small-size, lightweight, and easy to integrate. The main components of the Terrestrial Terminal are a receiver with a sensitivity of down to -132dB and a directional antenna. The TT is included in a compact and easy-to-handle form similar to a remote control device.
Terminals have the high processing power and low energy consumption, a definite advantage for mobile devices powered by batteries. The main functionality of the RS is “radio fox hunting” using a directional antenna (Yagi-Uda) and Received Signal Strength Indication (RSSI). Other functionalities include:
- Sending coordinates of the flying object (coordinates of the TT also recorded),
- Saving flight profile on the on-board SD card (up to 4 GB; received flight data also saved on an SD card of the TT),
- Remote control over the RT PA settings (switching between energy-saving and full power modes),
- Possibility to connect PC/laptop and display flight profile and coordinates in real-time on a map in dedicated software,
- Possibility to measure the velocity of the flying object based on Doppler frequency shift.
The system performance was evaluated during ground tests in the Tricity area. The first test was an attempt to achieve the maximum distance between the terminals while maintaining correct communication. In this verification, we obtained a distance of 28.,1 km (about -77 dB RSSI), which is still far from the absolute maximum range of the system.
The HRS-1 has also been successfully tested during multiple rocket launches.